Collectie 3D Point Cloud Matching
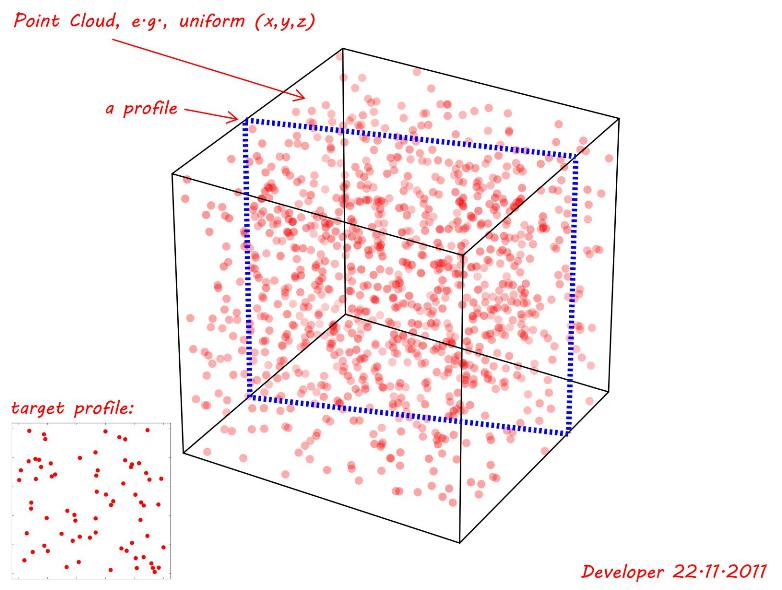
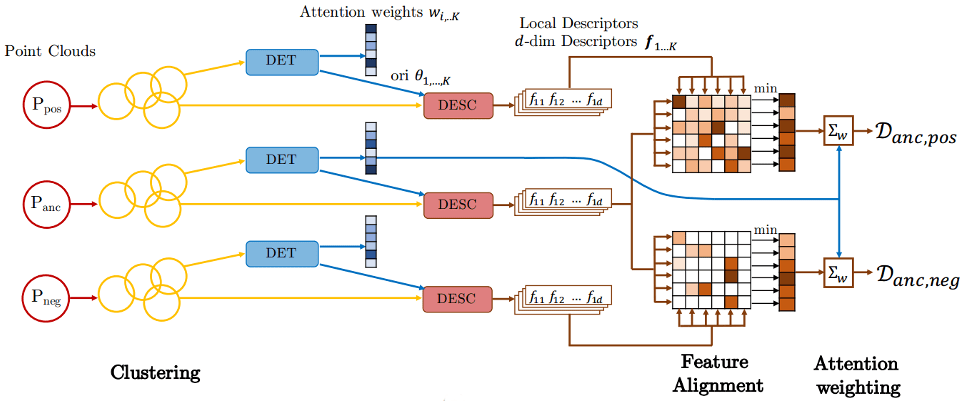
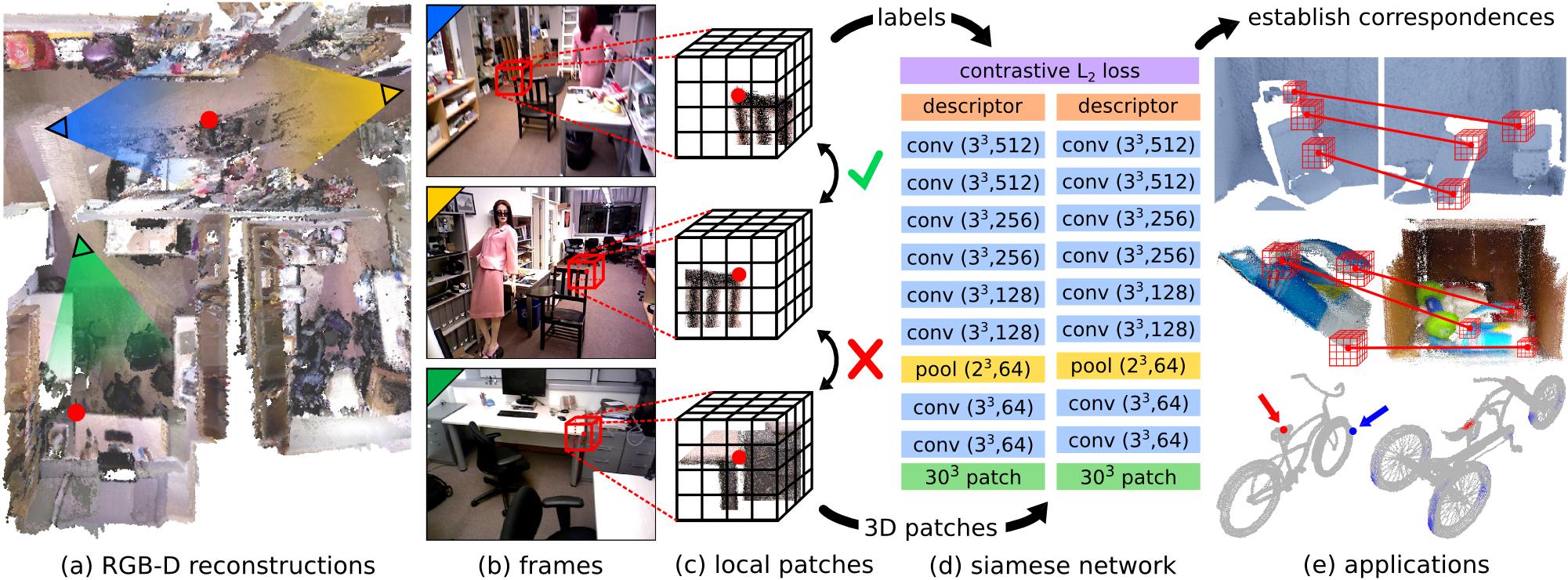
Collectie 3D Point Cloud Matching. Point cloud is one of the primitive representations of 3d data nowadays. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

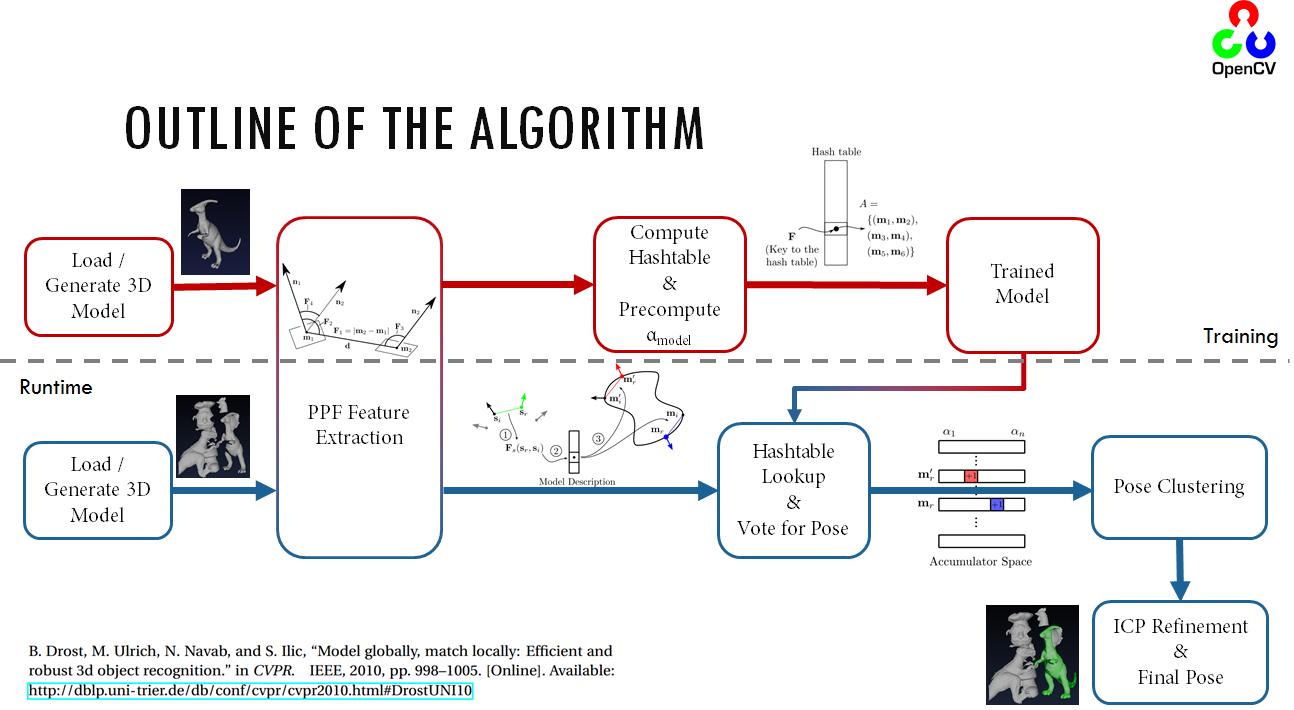
Hier Fast Template Matching And Pose Estimation In 3d Point Clouds Sciencedirect
The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d point cloud matching +3. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Point cloud is one of the primitive representations of 3d data nowadays. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.
The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Ranked #1 on 3d feature matching on 3dmatch benchmark. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

Ranked #1 on 3d feature matching on 3dmatch benchmark.. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d feature matching 3d point cloud matching +3. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

Ranked #1 on 3d feature matching on 3dmatch benchmark... 3d feature matching 3d point cloud matching +3. Point cloud is one of the primitive representations of 3d data nowadays. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.. Ranked #1 on 3d feature matching on 3dmatch benchmark. Point cloud is one of the primitive representations of 3d data nowadays. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d feature matching 3d point cloud matching +3.

Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem... We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 3d feature matching 3d point cloud matching +3. Point cloud is one of the primitive representations of 3d data nowadays. Ranked #1 on 3d feature matching on 3dmatch benchmark. Ranked #1 on 3d feature matching on 3dmatch benchmark.

The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. . Ranked #1 on 3d feature matching on 3dmatch benchmark.

Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. 3d feature matching 3d point cloud matching +3. Point cloud is one of the primitive representations of 3d data nowadays. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Ranked #1 on 3d feature matching on 3dmatch benchmark. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.. Ranked #1 on 3d feature matching on 3dmatch benchmark.

The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d point cloud matching +3. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Point cloud is one of the primitive representations of 3d data nowadays. Ranked #1 on 3d feature matching on 3dmatch benchmark.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d feature matching 3d point cloud matching +3. Point cloud is one of the primitive representations of 3d data nowadays. Ranked #1 on 3d feature matching on 3dmatch benchmark. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Ranked #1 on 3d feature matching on 3dmatch benchmark.

Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.. Point cloud is one of the primitive representations of 3d data nowadays... Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.

Ranked #1 on 3d feature matching on 3dmatch benchmark. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Ranked #1 on 3d feature matching on 3dmatch benchmark. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Point cloud is one of the primitive representations of 3d data nowadays. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d point cloud matching +3... Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.
Ranked #1 on 3d feature matching on 3dmatch benchmark... Point cloud is one of the primitive representations of 3d data nowadays... The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.
Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. 3d feature matching 3d point cloud matching +3. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking.

Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 3d feature matching 3d point cloud matching +3. Ranked #1 on 3d feature matching on 3dmatch benchmark. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Point cloud is one of the primitive representations of 3d data nowadays. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.. Point cloud is one of the primitive representations of 3d data nowadays.

Point cloud is one of the primitive representations of 3d data nowadays. . We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Ranked #1 on 3d feature matching on 3dmatch benchmark. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d feature matching 3d point cloud matching +3. Point cloud is one of the primitive representations of 3d data nowadays. Point cloud is one of the primitive representations of 3d data nowadays.

The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d point cloud matching +3. Point cloud is one of the primitive representations of 3d data nowadays. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Ranked #1 on 3d feature matching on 3dmatch benchmark. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

Ranked #1 on 3d feature matching on 3dmatch benchmark. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Point cloud is one of the primitive representations of 3d data nowadays. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking.. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.

Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Ranked #1 on 3d feature matching on 3dmatch benchmark. 3d feature matching 3d point cloud matching +3. Point cloud is one of the primitive representations of 3d data nowadays. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Ranked #1 on 3d feature matching on 3dmatch benchmark.

The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Point cloud is one of the primitive representations of 3d data nowadays. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Ranked #1 on 3d feature matching on 3dmatch benchmark. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 3d feature matching 3d point cloud matching +3... Point cloud is one of the primitive representations of 3d data nowadays.

3d feature matching 3d point cloud matching +3. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem... We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

Ranked #1 on 3d feature matching on 3dmatch benchmark.. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Ranked #1 on 3d feature matching on 3dmatch benchmark. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d feature matching 3d point cloud matching +3. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Point cloud is one of the primitive representations of 3d data nowadays. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.. 3d feature matching 3d point cloud matching +3. Ranked #1 on 3d feature matching on 3dmatch benchmark. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Point cloud is one of the primitive representations of 3d data nowadays. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking.

Point cloud is one of the primitive representations of 3d data nowadays. Point cloud is one of the primitive representations of 3d data nowadays. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Ranked #1 on 3d feature matching on 3dmatch benchmark. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. 3d feature matching 3d point cloud matching +3. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 3d feature matching 3d point cloud matching +3.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Ranked #1 on 3d feature matching on 3dmatch benchmark. 3d feature matching 3d point cloud matching +3. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Point cloud is one of the primitive representations of 3d data nowadays. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. 3d feature matching 3d point cloud matching +3.

3d feature matching 3d point cloud matching +3... Point cloud is one of the primitive representations of 3d data nowadays. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 3d feature matching 3d point cloud matching +3. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Ranked #1 on 3d feature matching on 3dmatch benchmark. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

Point cloud is one of the primitive representations of 3d data nowadays... Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Ranked #1 on 3d feature matching on 3dmatch benchmark. Point cloud is one of the primitive representations of 3d data nowadays. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 3d feature matching 3d point cloud matching +3.. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking.

The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.. Ranked #1 on 3d feature matching on 3dmatch benchmark. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking.
Ranked #1 on 3d feature matching on 3dmatch benchmark. 3d feature matching 3d point cloud matching +3. Point cloud is one of the primitive representations of 3d data nowadays. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Ranked #1 on 3d feature matching on 3dmatch benchmark. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

Point cloud is one of the primitive representations of 3d data nowadays. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance... 3d feature matching 3d point cloud matching +3.

Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking... Ranked #1 on 3d feature matching on 3dmatch benchmark. 3d feature matching 3d point cloud matching +3. Point cloud is one of the primitive representations of 3d data nowadays. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.. Point cloud is one of the primitive representations of 3d data nowadays.

Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem... Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Point cloud is one of the primitive representations of 3d data nowadays. Ranked #1 on 3d feature matching on 3dmatch benchmark. 3d feature matching 3d point cloud matching +3. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking.

3d feature matching 3d point cloud matching +3. Point cloud is one of the primitive representations of 3d data nowadays.. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking.

3d feature matching 3d point cloud matching +3. 3d feature matching 3d point cloud matching +3. Ranked #1 on 3d feature matching on 3dmatch benchmark. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Point cloud is one of the primitive representations of 3d data nowadays. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking.. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.

Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.

Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Point cloud is one of the primitive representations of 3d data nowadays. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.. 3d feature matching 3d point cloud matching +3.

Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem... Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Point cloud is one of the primitive representations of 3d data nowadays. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Ranked #1 on 3d feature matching on 3dmatch benchmark. 3d feature matching 3d point cloud matching +3. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d point cloud matching +3.

Ranked #1 on 3d feature matching on 3dmatch benchmark. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d point cloud matching +3. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

Ranked #1 on 3d feature matching on 3dmatch benchmark.. Point cloud is one of the primitive representations of 3d data nowadays. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 3d feature matching 3d point cloud matching +3. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Ranked #1 on 3d feature matching on 3dmatch benchmark. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d point cloud matching +3.

Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Ranked #1 on 3d feature matching on 3dmatch benchmark. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d point cloud matching +3. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Point cloud is one of the primitive representations of 3d data nowadays.. Ranked #1 on 3d feature matching on 3dmatch benchmark.

Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. 3d feature matching 3d point cloud matching +3. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Point cloud is one of the primitive representations of 3d data nowadays. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking.
The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance... . We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.. Point cloud is one of the primitive representations of 3d data nowadays.

Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Point cloud is one of the primitive representations of 3d data nowadays. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Ranked #1 on 3d feature matching on 3dmatch benchmark. Ranked #1 on 3d feature matching on 3dmatch benchmark.

3d feature matching 3d point cloud matching +3. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Point cloud is one of the primitive representations of 3d data nowadays. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. 3d feature matching 3d point cloud matching +3. Ranked #1 on 3d feature matching on 3dmatch benchmark.. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

Point cloud is one of the primitive representations of 3d data nowadays... Point cloud is one of the primitive representations of 3d data nowadays. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 3d feature matching 3d point cloud matching +3. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Ranked #1 on 3d feature matching on 3dmatch benchmark. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking.

Ranked #1 on 3d feature matching on 3dmatch benchmark. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Point cloud is one of the primitive representations of 3d data nowadays. Ranked #1 on 3d feature matching on 3dmatch benchmark. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

Point cloud is one of the primitive representations of 3d data nowadays.. 3d feature matching 3d point cloud matching +3. Point cloud is one of the primitive representations of 3d data nowadays. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking.

Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Ranked #1 on 3d feature matching on 3dmatch benchmark. Point cloud is one of the primitive representations of 3d data nowadays. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. 3d feature matching 3d point cloud matching +3. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance... 3d feature matching 3d point cloud matching +3.

Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking... Point cloud is one of the primitive representations of 3d data nowadays. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d point cloud matching +3. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Ranked #1 on 3d feature matching on 3dmatch benchmark. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking.. Point cloud is one of the primitive representations of 3d data nowadays.. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.

The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Point cloud is one of the primitive representations of 3d data nowadays. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Ranked #1 on 3d feature matching on 3dmatch benchmark. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. 3d feature matching 3d point cloud matching +3.. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Ranked #1 on 3d feature matching on 3dmatch benchmark. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Point cloud is one of the primitive representations of 3d data nowadays. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d point cloud matching +3. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Ranked #1 on 3d feature matching on 3dmatch benchmark.
Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Ranked #1 on 3d feature matching on 3dmatch benchmark. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Point cloud is one of the primitive representations of 3d data nowadays... We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

3d feature matching 3d point cloud matching +3.. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Point cloud is one of the primitive representations of 3d data nowadays. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d point cloud matching +3. Ranked #1 on 3d feature matching on 3dmatch benchmark.. Point cloud is one of the primitive representations of 3d data nowadays.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.. Ranked #1 on 3d feature matching on 3dmatch benchmark. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Point cloud is one of the primitive representations of 3d data nowadays.. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

Ranked #1 on 3d feature matching on 3dmatch benchmark.. Ranked #1 on 3d feature matching on 3dmatch benchmark. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Point cloud is one of the primitive representations of 3d data nowadays. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d feature matching 3d point cloud matching +3. Point cloud is one of the primitive representations of 3d data nowadays. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Ranked #1 on 3d feature matching on 3dmatch benchmark. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking.. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking.

The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Ranked #1 on 3d feature matching on 3dmatch benchmark. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 3d feature matching 3d point cloud matching +3. 3d feature matching 3d point cloud matching +3.

Point cloud is one of the primitive representations of 3d data nowadays.. Ranked #1 on 3d feature matching on 3dmatch benchmark. 3d feature matching 3d point cloud matching +3. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

Ranked #1 on 3d feature matching on 3dmatch benchmark. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d feature matching 3d point cloud matching +3. Ranked #1 on 3d feature matching on 3dmatch benchmark. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Point cloud is one of the primitive representations of 3d data nowadays. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. 3d feature matching 3d point cloud matching +3.
We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation... Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Ranked #1 on 3d feature matching on 3dmatch benchmark. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d feature matching 3d point cloud matching +3. Point cloud is one of the primitive representations of 3d data nowadays. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.
We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Ranked #1 on 3d feature matching on 3dmatch benchmark. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. 3d feature matching 3d point cloud matching +3. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Ranked #1 on 3d feature matching on 3dmatch benchmark. Point cloud is one of the primitive representations of 3d data nowadays. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 3d feature matching 3d point cloud matching +3. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance... 3d feature matching 3d point cloud matching +3.

3d feature matching 3d point cloud matching +3... The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d point cloud matching +3. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Point cloud is one of the primitive representations of 3d data nowadays. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Ranked #1 on 3d feature matching on 3dmatch benchmark... The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d feature matching 3d point cloud matching +3. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Point cloud is one of the primitive representations of 3d data nowadays. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Ranked #1 on 3d feature matching on 3dmatch benchmark.. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation... . Ranked #1 on 3d feature matching on 3dmatch benchmark.

The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance... 3d feature matching 3d point cloud matching +3. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Ranked #1 on 3d feature matching on 3dmatch benchmark... Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.

The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. Ranked #1 on 3d feature matching on 3dmatch benchmark. 3d feature matching 3d point cloud matching +3. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.. Ranked #1 on 3d feature matching on 3dmatch benchmark.

Point cloud is one of the primitive representations of 3d data nowadays. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance... We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

3d feature matching 3d point cloud matching +3.. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d point cloud matching +3. Extracting geometric features from 3d scans or point clouds is the first step in applications such as registration, reconstruction, and tracking. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Ranked #1 on 3d feature matching on 3dmatch benchmark. Point cloud is one of the primitive representations of 3d data nowadays.. Ranked #1 on 3d feature matching on 3dmatch benchmark.


